Методы последовательных улучшений для задач оптимального управления логико-динамическими системами
Разработаны приближенные методы решения задач оптимального управления для логико-динамических систем. Использование данных методов при решении задачи о шагающем двуногом роботе, которая была формализована как задача оптимального управления логико-динамической системой, позволило уменьшить в три раза по сравнению с начальным приближением амплитуду колебаний центра масс.
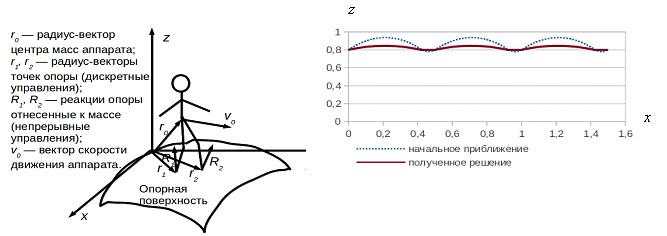
Рис. 3. Движение центра масс
Авторы результата: д.ф.-м.н. В.А. Батурин, Н.С. Малтугуева.

")
")
")
")
")

")
